-
tel: +86-510-88799777
-
email: e-sales@ddhi.com.cn
EN
Mini Excavator — Robot Welding System
Mini Excavator — Robot Welding System
May 28, 2025
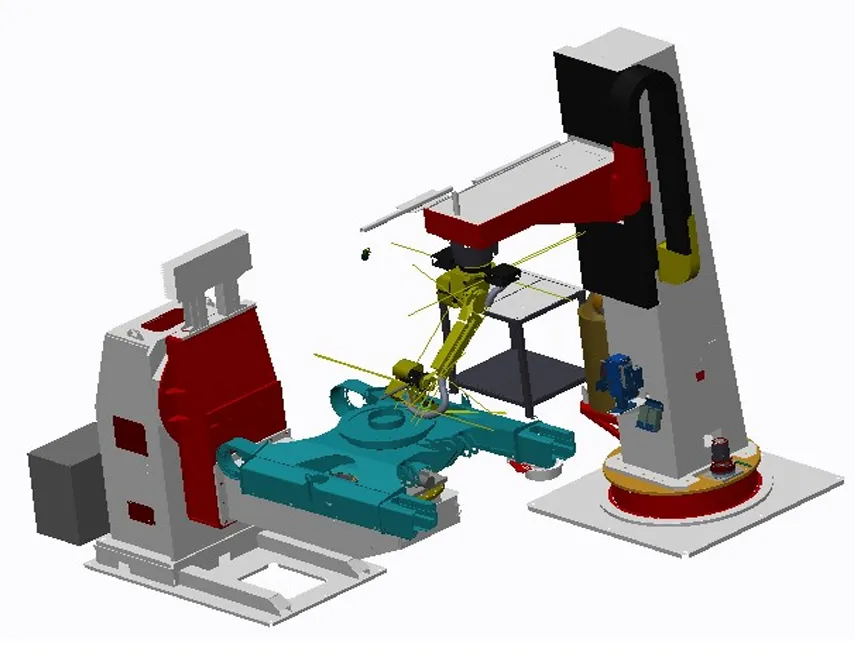
1. Overview
Designed for the precise welding of mini-excavator platform and lower support assemblies. Key features include:
l Single-Station Layout: Integrated with a robot and hydraulic automatic clamping fixture.
l Pre-Tack Welding: Manual assembly and tack welding of platforms before robotic processing.
l Touch-Wire Sensing: Ensures accurate seam positioning prior to fill welding.
l Efficient Cycle Operation: Continuous production with simple manual load/unload after each cycle.
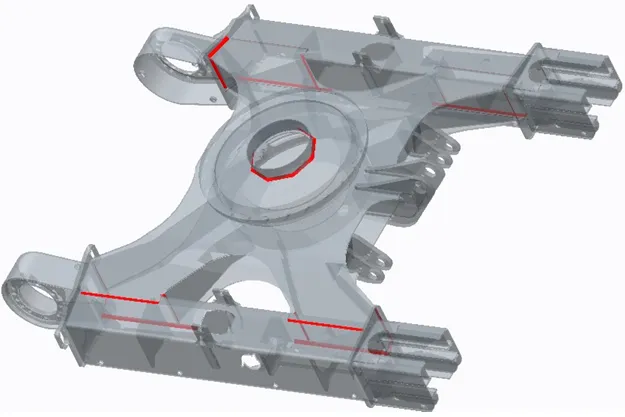
2. Typical Products
Robotic welding systems for mini-excavator platform and lower support assemblies
3. Industries
Engineering machinery manufacturing

Recent Posts

October 26, 2016
The Most Successful Engineering Contractor
May 15, 2026
Robot painting

May 28, 2025
Purifier Industry Robot Welding Room

May 28, 2025
Longitudinal Seam Welding Production Line
May 28, 2025
Drive Axle Welding Production LineContact US
Product Information
Quantity
Unit
Piece
Support order samples, customization, wholesale direct, and complete payment. If the product you look for does not have corresponding customized content, pls fill out the form below to contact us, and we will reply ASAP.